
|
| |||||||||||||||||||||||
| Site Index | |||||||||||||||||||||||
|
Overview | Results | Publications | Software | People | References
Overview:
A typical wireless sensor network performs only one action: sensing the environment. Our requirement for intelligent interaction with the environment has led to the emergence of Wireless Sensor and Actor Networks (WSANs), where a group of sensors, actors and a central coordination entity (sink) linked by wireless medium perform distributed sensing and acting tasks. In WSANs, the sensors monitor the environment based on which the sink issues commands to the actors to act on the environment.
In order to provide tight coupling between sensing and acting, an effective coordination mechanism is required among sensors and actors. In this context, we identify the problem of out-of-order execution of queries and commands due to a lack of coordination between sensors and actors. We identify four types of ordering problems in this project. We also identify and enumerate the associated challenges in addressing ordering issues. In this context, we discuss the basic design needed to address this problem efficiently. We propose a distributed and fully localized approach that addresses the problem and the associated challenges based on the design. Through analytical studies and simulations we study the performance of the proposed solution and two basic strategies, and show that the proposed solution is efficient for a variety of network conditions.
In WSANs, it is important that the actors act only to the appropriate level when the event occurs in order to perform the desired action on the evironment. In this context, we identify the problem of ``mutual exclusion", which is the need to act only once for any particular location and command. We define three flavors for mutual exclusion and show with an example application, the undesirable consequences of not providing mutual exclusion. We also identify and enumerate the different variants of the mutual exclusion problem for different application requirements.
Results / Status:
For all simulations, sufficiently large number of sensors and actors are randomly placed on a 2000mX2000m square area to ensure connectivity. The sensing range and communication range of sensors is set to be 30m, and the acting range and communication range of actors is 60m. Thereby, for the proposed approach, the dependency region for a query is 90m, while for a command, it is 120m. When an event is detected, a minimum sensor cover and actor cover is constructed. When the sink sends directives to the corresponding sensors or actors in the event region, the directives are first sent to the closest sensor or actor in the corresponding cover set. The closest sensor or actor then forwards the directives to the entire cover set. We assume CSMA/CA as the MAC protocol, with a retransmission time of 1 second when there are losses. The retransmission is repeated until successful delivery is achieved.
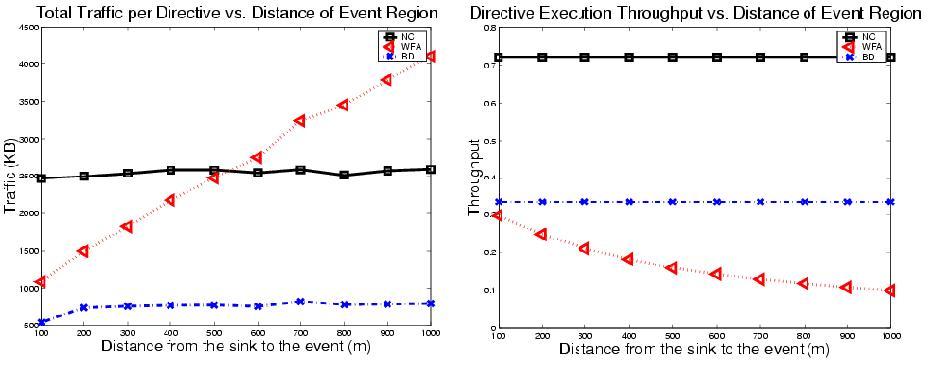 |
| Figure 1 |
|---|
Figure 1 shows the performance results of the proposed approach and two basic approaches for varying sink-to-event distances. We can see that the wait for all approach has a much higher overhead in dealing with far-away events due to the fact that all the sensors and actors in the event region are required to respond back to the sink. As shown in Figure 1(a), both bounded delay and the proposed approach have (almost) constant traffic, which only increases slightly with increasing sink-to-event distance. This is because the average traffic in delivering the directive is almost a constant. Additionally in the proposed approach, the traffic generated within the dependency region will always be a constant. Figure 1(b) shows that the proposed scheme has largest throughput. The throughput of wait for all drops because the waiting time for issuing a directive increases with increasing sink-to-event distance. Unlike wait for all, the throughput of the proposed approach and bounded delay do not change with the sink-to-event distance, since the latency between the execution of successive directives does not depends on the distance of the event from the sink.
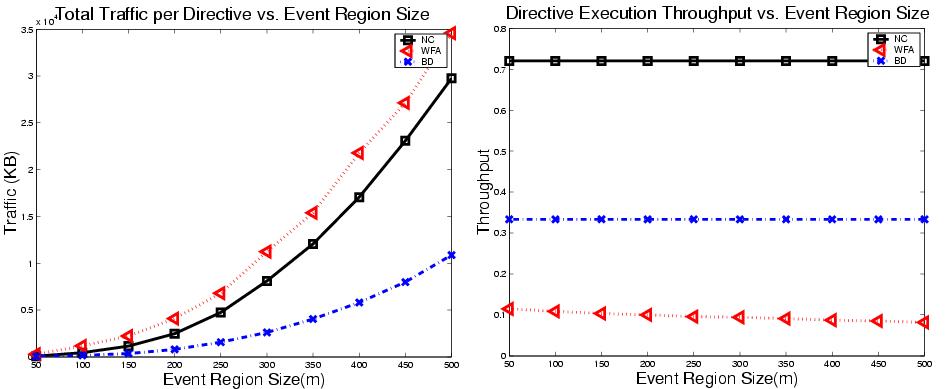 |
| Figure 2 |
|---|
Figure 2 shows the performance results of the three approaches under varying event region size. As shown in Figure 2(a), with increasing event region size, the traffic per directive of all three approaches increases. In bounded delay, this is mainly because of the increase in the number of nodes in the event region. While the bounded achieves the best performance in terms of overhead (in fact no overhead), it is only at the expense of correctness and throughput. For the proposed approach, aside from this reason, since each node has to receive notifications from all other nodes within its dependency region, the overhead is relatively large. For the wait for all strategy, since the acknowledgements to each directive has to be sent by all nodes to the sink, the traffic is very large. Figure 2(b) shows the throughput variation for increasing event size. As we can observe, the proposed approach has the largest directives execution throughput when compared with the basic approaches because the dependency region is just the 2-hop neighborhood region. Both the proposed approach and bounded delay have constant throughput values since their mechanisms are not affected by the region sizes, while wait for all's throughput drops slightly due to the fact that it must wait for more time to receive all the acknowledgements before issuing the next directive.
Publications & Presentations:
- R. Vedantham, Z. Zhuang and R. Sivakumar,
Hazard Avoidance in Wireless Sensor and Actor Networks ,"
to appear in Elsevier Computer Communications Journal, Special Issue on Wireless Sensor Networks, 2006. - R. Vedantham, Z. Zhuang and R. Sivakumar,
"Hazard Avoidance in Wireless Sensor and Actor Networks ,"
IEEE International Conference on Broadband Networks (BROADNETS), Boston, MA, USA, October 2005. - R. Vedantham, Z. Zhuang and R. Sivakumar,
"Mutual Exclusion in Wireless Sensor and Actor Networks ,"
Poster Presentation, ACM International Conference on Mobile Computing and Networking (MOBICOM), Cologne, Germany, August 2005. - R. Vedantham, Z. Zhuang and R. Sivakumar,
"Addressing Hazards in Wireless Sensor and Actor Networks ,"
Poster Presentation, ACM International Conference on Mobile Computing and Networking (MOBICOM), Cologne, Germany, August 2005.
Software Downloads:
People:
- Ramanuja Vedantham (Student)
- Zhenyun Zhuang (Student)
- Raghupathy Sivakumar (Professor)
References & Related Work:
- I.H. Kasimoglu and I.F. Akyildiz," Wireless Sensor and Actor Networks: Research Challenges", Ad Hoc Networks Journal, 2004.
- J.L. Henessey and D.A. Patterson, "Computer Architecture - A Quantitative Approach", Third Edition, Morgan Kaufmann, 2002.
- A. Silberschatz, P.B. Galvin, and G. Gagne, "Operating System Concepts", Sixth Edition, John Wiley and Sons, Inc., 2001.
- G. Coulouris, J. Dollimore and T. Kindberg, "Distributed Systems: Concepts and Design", Addison-Wessley, 2001.